John pointed out that one of the entries in this year’s race brazenly stole my idea for a self-stabilizing motorcycle. There’s even video of it wobbling around the campus. While it’s not a bad start, I think my design is better.
So here’s what I’ve got:
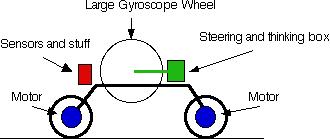
By making the gyroscope very large, it won’t have to spin as fast to get the same stability. The things steers by tilting over, controlled by the gyroscope. Raising the main gyro way up improves ground clearance. I have now dubbed my machine The Camel.
Putting the motors directly on the wheels like that implies electric, but I doubt that’s practical unless it was solar powered. Batteries would just weigh too much and be too bulky. Probably end up with little gasoline motors, but they’re harder to control. Fuel cells? Steam power? Mr. Fusion?
No napkin scanner, but this way I get color, too!

several comments: first, what are the official rules? Secondly, it was funny/interesting/mildly surprising how poorly all the entries did. One problem I feel, was that all teams said to themselves, “there’s two issues, 1) having a vehicle that can handle difficult terrain, and 2) having the vehicle be self functioning (i.e. robotic).” And then all teams conlcuded, “hey there’s all terrain vehicles already out there, and so we need to concentrate on the robotics.” They then proceeded to tack self guidance systems onto existing platforms that couldn’t drive over a hill. So my conclusion is, its time to spread some focus back to the first issue – making an all terrain vehicle.
Thirdly, do I need to add hard returns to this commenter? Fourthly, don’t you need 3 motors – one on each wheel, and one powering the gyro? nextly – comments must be less than 1000 wds, so I have to stop.
Yeah, I left off the little motor for the gyro. It’s an interesting little problem, a motor that spins really, really fast but delivers (and consumes) little power. they must exist for other gyroscopes, though. I imagine using an external motor to spin up the gyro to start with. There would be some seriously geared-up attachment to allow a 3/4 HP DeWalt plunge router to spin up the gyros.
I also left off the horizontal gyro that can make the vehicle raise the front or rear wheel. It didn’t seem necessary since the course appears to be all roads. Of course many of the vehicles in this race ran into trouble when they strayed off the road and couldn’t get back on. If there are offroad and more rugged sections, I would put “Mountain Camel Mode” back on.
1000 character limit. Damn restricted free stuff.
Many of the teams used sensing/control packages that are commercially available, and I think they all use GPS for guidance. I think some vector processing software to turn the set of waypoints into a path would be useful.
I think the biggest problem with this design will be range.
I found the darpa site on this grand challenge. The summary of results makes for really interesting reading. Vehicle flipped attempting 90 degree turn, vehicle hopelessly entangled in wire, vehicle hit wall in starting chute, and on and on. I bet it was a sobering experience for the teams.
You need to come up with a team name. I like the mysterio/terse red team – but its taken.
Yeah, with red team and blue team taken, the romance goes out of using a color (except perhaps “team noir”)
There’s always Team GPQ for get poor quick, or Team Jetster – although then it should have three wheels – unless the main gyro is a wheel…